Appendix 12 — Derivation of the Euler–Lagrange Equation
Appendix 12.1 — Definition of the Functional
We begin with a function \( f_{1} \) that depends on three variables:
\(t\), \(x_{1}(t)\) and \( \dot{x}_{1}(t) = \frac{dx_{1}}{dt} \):
\begin{equation}
f_{1} = f\!\left(t,\, x_{1}(t),\, \dot{x}_{1}(t)\right).
\end{equation}
Here \(x_{1}(t)\) is a function of \(t\), so \(\dot{x}_{1}(t)\) is not zero.
In fact, \(t\) is the only independent variable;
\(f_{1}\) is therefore a function of a function.
We now consider the functional:
\begin{equation}
I_{1} = \int_{t_{1}}^{t_{2}}
f\!\left(t,\, x_{1}(t),\, \dot{x}_{1}(t)\right)\, dt.
\end{equation}
We seek the extremal value (minimum, maximum, or saddle point) of \(I_{1}\).
For this, it must hold that:
\begin{equation}
\delta I_{1} = 0.
\end{equation}
Appendix 12.2 — Variation of the Path
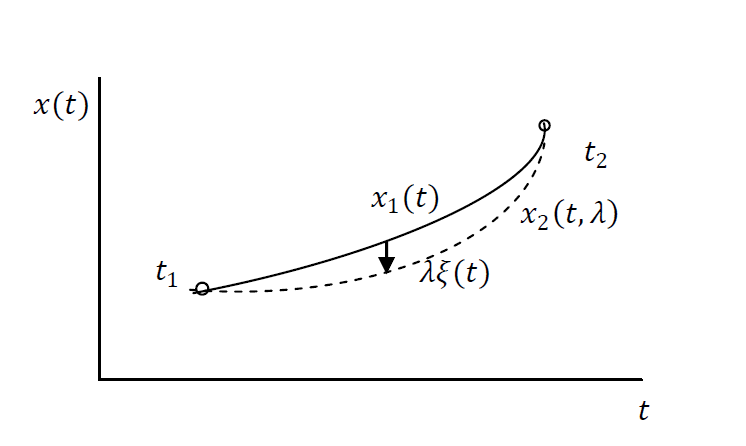
To prove that \(I_{1}\) is an extremum, we consider a slightly shifted curve:
\begin{equation}
x_{2}(t,\lambda)
= x_{1}(t) + \lambda\, \xi(t),
\end{equation}
where:
\(\lambda\) is a small parameter, independent of \(t\),
\(\xi(t)\) is an arbitrary but smooth function.
Because the variation must not change the endpoints, it follows that:
\begin{equation}
\xi(t_{1}) = 0,
\qquad
\xi(t_{2}) = 0.
\end{equation}
The function \(x_{2}(t,\lambda)\) therefore differs only between \(t_{1}\) and \(t_{2}\),
but coincides with \(x_{1}(t)\) at the endpoints.
Appendix 12.3 — Variation of the Functional
The integral \(I_{2}\) for the neighboring curve is:
\begin{equation}
I_{2} = \int_{t_{1}}^{t_{2}} f_{2}\, dt.
\end{equation}
With:
\begin{equation}
f_{2} = f\!\left(t,\; x_{2}(t,\lambda),\; \frac{d{x}_{2}(t,\lambda)}{dt}\right).
\end{equation}
By substituting (6) into equation (4) , we obtain:
\begin{equation}
I_2=\int_{t_1}^{t_2} f\!\left(t,\; x_{2}(t,\lambda),\; \frac{d{x}_{2}(t,\lambda)}{dt}\right)dt.
\end{equation}
\begin{equation}
=\int_{t_1}^{t_2} f\!\left(t,\; x_{1}(t)+\lambda\xi(t)),\;
\frac{d\left({x}_{1}(t)+\lambda\xi(t)\right)}{dt}\right)dt.
\end{equation}
\begin{equation}
I_2=\int_{t_1}^{t_2} f\!\left(t,\; x_{1}(t)+\lambda\xi(t)),\;
\frac{d{x}_{1}(t)}{dt}+\frac{d\lambda\xi(t)}{dt}\right)dt
\end{equation}
Because \(I_{1}\) is an extremal value, \(I_{2}\) must also be extremal for \(\lambda = 0\):
\begin{equation}
\lim_{\lambda \to 0} I_{2}
= \text{minimum, maximum or saddle point}.
\end{equation}
The extremal value is found by taking the derivative with respect to \(\lambda\)
and setting it equal to zero:
\begin{equation}
\lim_{\lambda \to 0}
\frac{d I_{2}}{d\lambda}
= 0.
\end{equation}
In combination with equation (6) :
\begin{equation}
\lim_{\lambda \to 0}
\frac{d}{d\lambda}
\int_{t_{1}}^{t_{2}} f_{2}\, dt
= 0,
\end{equation}
or:
\begin{equation}
\lim_{\lambda \to 0}
\int_{t_{1}}^{t_{2}}
\frac{d f_{2}}{d\lambda}\, dt
= 0.
\end{equation}
Appendix 12.4 — Differentiation with respect to the variation parameter
We had:
\begin{equation}
\lim_{\lambda \to 0}
\frac{d}{d\lambda}
\int_{t_{1}}^{t_{2}}\left( f_{2}\, dt\right) = 0.
\end{equation}
Since this is a product of two functions, we apply the rule of partial differentiation:
\begin{equation}
\lim_{\lambda \to 0}
\int_{t_{1}}^{t_{2}}
\left(
\frac{d f_{2}}{d\lambda}\, dt
+ f_{2}\, \frac{d}{d\lambda}(dt)
\right)
= 0.
\end{equation}
Since \(t\) and \(\lambda\) are independent, we have:
\begin{equation}
\frac{d t}{d\lambda} = 0,
\end{equation}
so the second term vanishes:
\begin{equation}
\lim_{\lambda \to 0}
\int_{t_{1}}^{t_{2}}
\frac{d f_{2}}{d\lambda}\, dt
= 0
\end{equation}
Appendix 12.5 — Expansion of \( \frac{d f_{2}}{d\lambda} \)
As mentioned earlier, \(f_2\) is a function of three variables:
\begin{equation}
f_{2} = f\!\left(t,\; x_{2},\; \dot{x}_{2}\right).
\end{equation}
We now apply the chain rule:
\begin{equation}
\frac{d f_{2}}{d\lambda}
=
\frac{\partial f_{2}}{\partial t}\frac{dt}{d\lambda}
+ \frac{\partial f_{2}}{\partial x_{2}}\frac{dx_{2}}{d\lambda}
+ \frac{\partial f_{2}}{\partial \dot{x}_{2}}
\frac{d\dot{x}_{2}}{d\lambda}
\end{equation}
thus:
\begin{equation}
\lim_{\lambda \to 0}
\int_{t_{1}}^{t_{2}}
\left(
\frac{\partial f_{2}}{\partial t}\frac{dt}{d\lambda}
+ \frac{\partial f_{2}}{\partial x_{2}}\frac{dx_{2}}{d\lambda}
+ \frac{\partial f_{2}}{\partial \dot{x}_{2}}
\frac{d\dot{x}_{2}}{d\lambda}
\right)\, dt
= 0
\end{equation}
Since \(t\) and \(\lambda\) are independent, the first term is zero:
\begin{equation}
\lim_{\lambda \to 0}
\int_{t_{1}}^{t_{2}}
\left(
\frac{\partial f_{2}}{\partial t}\cdot 0
+ \frac{\partial f_{2}}{\partial x_{2}}\frac{dx_{2}}{d\lambda}
+ \frac{\partial f_{2}}{\partial \dot{x}_{2}}
\frac{d\dot{x}_{2}}{d\lambda}
\right)\, dt
= 0
\end{equation}
\begin{equation}
\lim_{\lambda \to 0}
\int_{t_{1}}^{t_{2}}
\left(
\frac{\partial f_{2}}{\partial x_{2}}\frac{dx_{2}}{d\lambda}
+ \frac{\partial f_{2}}{\partial \dot{x}_{2}}
\frac{d\dot{x}_{2}}{d\lambda}
\right)\, dt
= 0
\end{equation}
Since:
\begin{equation}
\frac{d\dot{x}_{2}}{d\lambda}
=\frac{d^2x_2}{dtd\lambda}
= \frac{d}{dt}\left(\frac{dx_{2}}{d\lambda}\right)
\end{equation}
equation (22) , together with (24) , leads to:
\begin{equation}
\lim_{\lambda \to 0}
\int_{t_{1}}^{t_{2}}
\left(
\frac{\partial f_{2}}{\partial x_{2}}\frac{dx_{2}}{d\lambda}
+ \frac{\partial f_{2}}{\partial \dot{x}_{2}}
\frac{d}{dt}\left(\frac{dx_{2}}{d\lambda}\right)
\right)dt=0
\end{equation}
\begin{equation}
\lim_{\lambda \to 0}
\left(
\int_{t_{1}}^{t_{2}}
\frac{\partial f_{2}}{\partial x_{2}}\frac{dx_{2}}{d\lambda}dt
+
\int_{t_{1}}^{t_{2}}
\frac{\partial f_{2}}{\partial \dot{x}_{2}}
\frac{d}{dt}\left(\frac{dx_{2}}{d\lambda}\right)dt
\right)=0
\end{equation}
Appendix 12.6 — Integration by Parts
We now integrate the second term by parts:
\begin{equation}
\int_{t_{1}}^{t_{2}}
\frac{\partial f_{2}}{\partial \dot{x}_{2}}
\frac{d}{dt}\left(\frac{dx_{2}}{d\lambda}\right)\, dt
=
\int_{t_{1}}^{t_{2}}
\frac{\partial f_{2}}{\partial \dot{x}_{2}}
d\left(\frac{dx_{2}}{d\lambda}\right)
\end{equation}
\begin{equation}
=
\left[
\frac{\partial f_{2}}{\partial \dot{x}_{2}}
\frac{dx_{2}}{d\lambda}
\right]_{t_{1}}^{t_{2}}
-
\int_{t_{1}}^{t_{2}}
\frac{dx_{2}}{d\lambda}\,
\frac{d}{dt}\left(
\frac{\partial f_{2}}{\partial \dot{x}_{2}}
\right)
\, dt.
\end{equation}
The derivative of \(x_2\) with respect to \(\lambda\) is obtained by differentiating equation (4) :
\begin{equation}
\frac{dx_2(t,\lambda)}{d\lambda}=\frac{d\left(x_1(t)+\lambda\xi(t)\right)}{d\lambda}=0+\xi(t)=\xi(t)
\end{equation}
Since the function \(\xi(t)\) is zero at the boundaries of the integral (see equation (5) ), the
left part of the right-hand term in equation (27) vanishes:
\begin{equation}
\int_{t_{1}}^{t_{2}}
\frac{\partial f_{2}}{\partial \dot{x}_{2}}
\frac{d}{dt}\left(\frac{dx_{2}}{d\lambda}\right)\, dt
=
\left[
\frac{\partial f_{2}}{\partial \dot{x}_{2}}
\frac{dx_{2}}{d\lambda}
\right]_{t_{1}}^{t_{2}}
-
\int_{t_{1}}^{t_{2}}
\frac{dx_{2}}{d\lambda}\,
\frac{d}{dt}\left(
\frac{\partial f_{2}}{\partial \dot{x}_{2}}
\right)
\, dt
\end{equation}
This therefore gives:
\begin{equation}
\int_{t_{1}}^{t_{2}}
\frac{\partial f_{2}}{\partial \dot{x}_{2}}
\frac{d}{dt}\left(\frac{dx_{2}}{d\lambda}\right)\, dt
=
-
\int_{t_{1}}^{t_{2}}
\frac{dx_{2}}{d\lambda}\,
\frac{d}{dt}\left(
\frac{\partial f_{2}}{\partial \dot{x}_{2}}
\right)
\, dt
\end{equation}
This result combined with equation (25) leads to:
\begin{equation}
\lim_{\lambda \to 0}
\left(
\int_{t_{1}}^{t_{2}}
\frac{\partial f_{2}}{\partial x_2}\frac{dx_2}{d\lambda}\, dt
+
\int_{t_{1}}^{t_{2}}
\frac{\partial f_{2}}{\partial \dot x_2}\,
\frac{d\left(\frac{dx_2}{d\lambda}\right)}{dt}dt
\right)
= 0
\end{equation}
\begin{equation}
\lim_{\lambda \to 0}
\left(
\int_{t_{1}}^{t_{2}}
\frac{\partial f_{2}}{\partial x_2}\frac{dx_2}{d\lambda}\, dt
-
\int_{t_{1}}^{t_{2}}
\frac{dx_{2}}{d\lambda}\,
\frac{d}{dt}\left(
\frac{\partial f_{2}}{\partial \dot{x}_{2}}\right)dt
\right)
= 0
\end{equation}
\begin{equation}
\lim_{\lambda \to 0}
\int_{t_{1}}^{t_{2}}
\left(
\frac{\partial f_{2}}{\partial x_2}\frac{dx_2}{d\lambda}
-
\frac{dx_{2}}{d\lambda}\,
\frac{d}{dt}
\left(\frac{\partial f_{2}}{\partial \dot{x}_{2}}\right)\right)dt
= 0
\end{equation}
\begin{equation}
\lim_{\lambda \to 0}
\int_{t_{1}}^{t_{2}}
\left(
\frac{\partial f_{2}}{\partial x_2}
-
\,
\frac{d}{dt}
\left(\frac{\partial f_{2}}{\partial \dot{x}_{2}}\right)\right)\frac{dx_2}{d\lambda}dt
= 0
\end{equation}
To make this integral zero, we require that:
\begin{equation}
\lim_{\lambda \to 0}
\left(
\frac{\partial f_{2}}{\partial x_2}
-
\,
\frac{d}{dt}
\left(\frac{\partial f_{2}}{\partial \dot{x}_{2}}\right)\right)
= 0
\end{equation}
\begin{equation}
\frac{\partial f_{2}}{\partial x_2}
-
\,
\frac{d}{dt}
\left(\frac{\partial f_{2}}{\partial \dot{x}_{2}}\right)
= 0
\end{equation}
Now \(\lambda\) has completely disappeared and we have obtained a general expression for the condition that a function must satisfy in order for the integral \(I\) to have an extremal value.
(1) for our derivation, but we could make this starting point even more general by considering a function such as:
\begin{equation}
f_1=f\left(t,x_1(t),\frac{dx_1(t)}{dt}, x_2(t), \frac{dx_2(t)}{dt}
\text{..............}x_n(t),\frac{dx_n(t)}{dt} \right)
\end{equation}
This would have led to a more general form of equation (37) :
\begin{equation}
\frac{\partial f}{\partial x_n}
-
\,
\frac{d}{dt}
\left(\frac{\partial f}{\partial \dot{x_n}}\right)
= 0
\end{equation}
Or in another notation:
\begin{equation}
\frac{d}{dt}
\left(\frac{\partial f}{\partial \dot{x_n}}\right)
=
\frac{\partial f}{\partial x_n}
\end{equation}
Equation (40) is the Euler–Lagrange equation. It gives the condition that a function must satisfy in order for the integral \(I\) to have an extremal value.
This forms the foundation of the calculus of variations, classical mechanics,
field theory, and general relativity.